Multi Target¶
Model of a spatial radar channel featuring multiple reflecting targets.
The following minimal example outlines how to configure the channel model
within the context of a Simulation:
1# Initialize a single device operating at 78.5 GHz
2simulation = Simulation()
3device = simulation.new_device(carrier_frequency=78.5e9)
4
5# Create a radar channel modeling two targets at 10m and 50m distance
6channel = MultiTargetRadarChannel(attenuate=False)
7simulation.set_channel(device, device, channel)
8
9first_target = VirtualRadarTarget(
10 FixedCrossSection(1),
11 StaticTrajectory(Transformation.From_Translation(np.array([10, 0, 0]))),
12 static=False,
13)
14second_target = VirtualRadarTarget(
15 FixedCrossSection(1),
16 StaticTrajectory(Transformation.From_Translation(np.array([0, 50, 0]))),
17 static=True,
18)
19channel.add_target(first_target)
20channel.add_target(second_target)
21
22# Configure an FMCW radar with 5 GHz bandwidth illuminating the target
23radar = Radar(FMCW())
24device.add_dsp(radar)
25
26# Configure a simulation evluating the radar's operating characteristics
27simulation.add_evaluator(ReceiverOperatingCharacteristic(radar, device, device, channel))
28simulation.new_dimension('noise_level', dB(np.arange(0, -22, -2).tolist()), device)
29simulation.num_samples = 1000
30
31# Run simulation and plot resulting ROC curve
32result = simulation.run()
33result.plot()
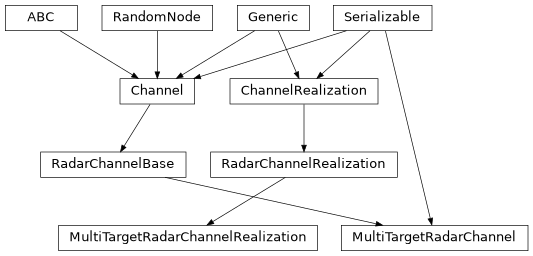
- class MultiTargetRadarChannel(interference=True, decorrelation_distance=inf, attenuate=True, gain=1.0, seed=None)[source]¶
Bases:
RadarChannelBase[MultiTargetRadarChannelRealization],SerializableModel of a spatial radar channel featuring multiple reflecting targets.
- Parameters:
interference (
bool) – Should the channel model consider interference between the linked devices? Enabled by default.decorrelation_distance (
float) – Distance at which the channel’s random variable realizations are considered uncorrelated. \(\infty\) by default, meaning the channel is static in space.attenuate (
bool) – Should the propagated signal be attenuated during propagation modeling? Enabled by default.gain (
float) – Linear power gain factor a signal experiences when being propagated over this realization. \(1.0\) by default.seed (
int|None) – Seed used to initialize the pseudo-random number generator.
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- _realize()[source]¶
Generate a new channel realzation.
Abstract subroutine of
realize. EachChannelis required to implement their own_realize()method.Returns: A new channel realization.
- Return type:
- add_target(target)[source]¶
Add a new target to the radar channel.
- Parameters:
target (
RadarTarget) – Target to be added.- Return type:
- make_target(moveable, cross_section, *args, **kwargs)[source]¶
Declare a moveable to be a target within the radar channel.
- Parameters:
moveable (
Moveable) – Moveable to be declared as a target.cross_section (
RadarCrossSectionModel) – Radar cross section model of the target.*args – Additional positional arguments passed to the target’s constructor.
**kwargs – Additional keyword arguments passed to the target’s constructor.
- Returns:
The newly created target.
- Return type:
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- property decorrelation_distance: float[source]¶
Decorrelation distance of the radar channel.
- Raises:
ValueError – For decorrelation distances smaller than zero.
- interference: bool[source]¶
Consider interference between linked devices.
Only applies in the bistatic case, where transmitter and receiver are two dedicated device instances.
- property targets: Set[RadarTarget][source]¶
Set of targets considered within the radar channel.
- class MultiTargetRadarChannelRealization(consistent_realization, phase_variable, targets, interference, attenuate, sample_hooks, gain)[source]¶
Bases:
RadarChannelRealizationRealization of a spatial multi target radar channel.
Generated by the
_realizemethod ofMultiTargetRadarChannel.- Parameters:
sample_hooks (
Set[ChannelSampleHook[RadarChannelSample]]) – Hooks to be called after the channel is sampled.gain (
float) – Linear power gain factor a signal experiences when being propagated over this realization.
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- class RadarTarget(static=False)[source]¶
Bases:
SerializableAbstract base class of radar targets.
Radar targets represent reflectors of electromagnetic waves within
RadarChannelBaseinstances.- Parameters:
static (
bool) – Is the target visible during null hypothesis testing? Disabled by default.
- abstract sample_cross_section(impinging_direction, emerging_direction)[source]¶
Query the target’s radar cross section.
The target radr cross section is denoted by the vector \(\sigma_{\ell}\) within the respective equations.
- Parameters:
- Return type:
Returns: The assumed radar cross section in \(m^2\).
- abstract sample_trajectory(timestamp)[source]¶
Sample the target’s trajectory at a given time.
- Parameters:
timestamp (
float) – Time at which to sample the trajectory in seconds.- Return type:
Returns: A sample of the trajectory.
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- class VirtualRadarTarget(cross_section, trajectory=None, static=False)[source]¶
Bases:
Moveable,RadarTargetModel of a spatial radar target only existing within a channe link.
- Parameters:
cross_section (
RadarCrossSectionModel) – The assumed cross section model.trajectory (
Trajectory|None) – The assumed trajectory of the target. By default, the target is assumed to be static.static (
bool) – SeeRadarTarget.static(). Disabled by default.
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- sample_cross_section(impinging_direction, emerging_direction)[source]¶
Query the target’s radar cross section.
The target radr cross section is denoted by the vector \(\sigma_{\ell}\) within the respective equations.
- Parameters:
- Return type:
Returns: The assumed radar cross section in \(m^2\).
- sample_trajectory(timestamp)[source]¶
Sample the target’s trajectory at a given time.
- Parameters:
timestamp (
float) – Time at which to sample the trajectory in seconds.- Return type:
Returns: A sample of the trajectory.
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- property cross_section: RadarCrossSectionModel[source]¶
The represented radar cross section model.
- class PhysicalRadarTarget(cross_section, moveable, static=False)[source]¶
Bases:
RadarTarget,SerializableModel of a spatial radar target representing a moveable object.
The radar target will always be modeled at its moveable global position.
- Parameters:
cross_section (
RadarCrossSectionModel) – The assumed cross section model.moveable (
Moveable) – The moveable object this radar target represents.static (
bool) – SeeRadarTarget.static(). Disabled by default.
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- sample_cross_section(impinging_direction, emerging_direction)[source]¶
Query the target’s radar cross section.
The target radr cross section is denoted by the vector \(\sigma_{\ell}\) within the respective equations.
- Parameters:
- Return type:
Returns: The assumed radar cross section in \(m^2\).
- sample_trajectory(timestamp)[source]¶
Sample the target’s trajectory at a given time.
- Parameters:
timestamp (
float) – Time at which to sample the trajectory in seconds.- Return type:
Returns: A sample of the trajectory.
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- property cross_section: RadarCrossSectionModel[source]¶
The represented radar cross section model.
- class RadarCrossSectionModel[source]¶
Bases:
SerializableBase class for spatial radar cross section models.
- class FixedCrossSection(cross_section)[source]¶
Bases:
RadarCrossSectionModelModel of a fixed cross section.
Can be interpreted as a spherical target floating in space.
- Parameters:
cross_section (
float) – The cross section in \(\mathrm{m}^2\).
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- get_cross_section(_, __)[source]¶
Query the model’s cross section.
- Parameters:
impinging_direction – Direction from which a far-field source impinges onto the cross section model.
emerging_direction – Direction in which the scatter wave leaves the cross section model.
- Return type:
Returns: The assumed cross section in \(m^2\).
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- property cross_section: float[source]¶
The assumed cross section.
Returns: The cross section in \(\mathrm{m}^2\).
- Raises:
ValueError – For cross sections smaller than zero.