Matched Filtering¶
- class MatchedFilterJcas(max_range, waveform=None, receive_beamformer=None, detector=None, min_range=0.0, max_velocity=0.0, velocity_resolution=1.0, selected_transmit_ports=None, selected_receive_ports=None, carrier_frequency=None, seed=None)[source]¶
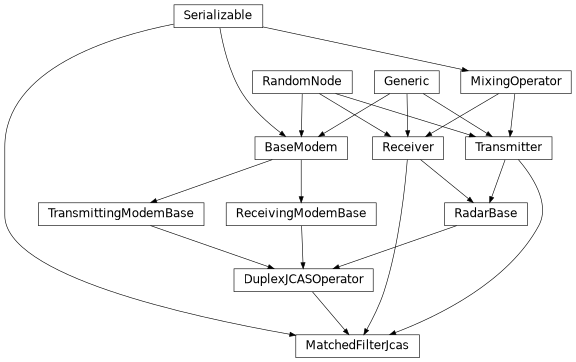
Bases:
DuplexJCASOperator[CommunicationWaveform],Transmitter[JCASTransmission],Receiver[JCASReception],SerializableJoint Communication and Sensing Operator.
A combination of communication and sensing operations. Senses the enviroment via a correlatiom-based time of flight estimation of transmitted waveforms.
- Parameters:
max_range (
float) – Maximally detectable range in m.waveform (
CommunicationWaveform|None) – Communication waveform used for transmission. If not specified, transmitting or receiving will not be possible.receive_beamformer (
ReceiveBeamformer|None) – Beamforming applied during signal reception. If not specified, no beamforming will be applied during reception.detector (
RadarDetector|None) – Detector routine configured to generate point clouds from radar cubes. If not specified, no point cloud will be generated during reception.min_range (
float) – Minimal range considered for the generated radar cubes. Zero by default, but can be adjusted to ignore, for example, self-interference.selected_transmit_ports (
Sequence[int] |None) – Indices of antenna ports selected for transmission from the operatedDevice'santenna array. If not specified, all available ports will be considered.selected_receive_ports (
Sequence[int] |None) – Indices of antenna ports selected for reception from the operatedDevice'santenna array. If not specified, all available antenna ports will be considered.carrier_frequency (
float|None) – Central frequency of the mixed signal in radio-frequency transmission band. If not specified, the operatedDevice'sdefault carrier frequency will be assumed during signal processing.seed (
int|None) – Random seed used to initialize the pseudo-random number generator.
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- frame_duration(bandwidth)[source]¶
Duration of a single communication frame in seconds.
- Parameters:
bandwidth (
float) – Target bandwidth of the communication waveform in Hz.- Return type:
Convenience wrapper for the
waveformframe_durationmethod.
- notify_transmit_callbacks(transmission)[source]¶
Notify the registered callbacks about the generated transmission.
- Parameters:
transmission (
JCASTransmission) – Transmission to be passed to the callbacks.- Return type:
- range_resolution(sampling_rate)[source]¶
Resolution of the Range Estimation.
- Parameters:
sampling_rate (
float) – Sampling rate of the transmitted and received signal in Hz. Defined as the waveform’s bandwidth times the oversampling factor.- Returns:
Resolution in m.
- Return type:
- Raises:
ValueError – If the range resolution is smaller or equal to zero.
- samples_per_frame(bandwidth, oversampling_factor)[source]¶
Number of samples required to process at least a single frame.
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- property max_range: float[source]¶
Maximally estimated reange in m.
- Raises:
ValueError – If max_range is smaller or equal to zero.
- property max_velocity: float[source]¶
Maximal absolute detectable velocity in m/s.
- Raises:
ValueError – If max_velocity is smaller than zero.
- property power: float[source]¶
Expected power of the transmitted signal in Watts.
Note
Applies only to the signal-carrying parts of the transmission, silent parts shuch as guard intervals should not be considered.
- property velocity_resolution: float[source]¶
Velocity resolution in m/s.
- Raises:
ValueError – If velocity_resolution is smaller or equal to zero.