Delay Calibration¶
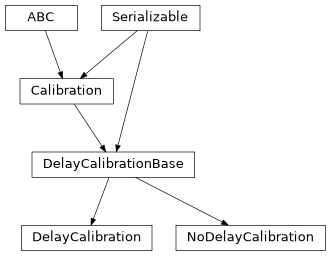
- class DelayCalibrationBase(device=None, transmit_ports=None, receive_ports=None)[source]¶
Bases:
Calibration,SerializableAbstract base class for all delay calibration classes.
Args:
- device:
The physical device to which this calibration belongs. If provided, the device will be configured to use this calibration.
- transmit_ports:
List of transmit port indices considered for this calibration. If
None, all available transmit ports are assumed.- receive_ports:
List of receive port indices considered for this calibration. If
None, all available receive ports are assumed.
- correct_receive_delay(signal)[source]¶
Apply the delay calibration to a received signal.
Returns: The corrected signal.
- class DelayCalibration(delay, physical_device=None)[source]¶
Bases:
DelayCalibrationBaseStatic delay calibration
Args:
- device:
The physical device to which this calibration belongs. If provided, the device will be configured to use this calibration.
- transmit_ports:
List of transmit port indices considered for this calibration. If
None, all available transmit ports are assumed.- receive_ports:
List of receive port indices considered for this calibration. If
None, all available receive ports are assumed.
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- static Estimate(device, max_delay, num_iterations=10, wait=0.0, transmit_ports=None, receive_ports=None)[source]¶
Estimate a physical device’s inherent transmit-receive delay.
Ideally, the transmit and receive channels of the device should be connected by a patch cable. WARNING: An attenuator element may be required! Be careful!!!!
- Parameters:
device (
PhysicalDevice) – The physical device to calibrate, i.e. the device of which a delay is to be estimated.max_delay (
float) – The maximum expected delay which the calibration should compensate for in seconds.num_iterations (
int) – Number of calibration iterations. Default is 10.wait (
float) – Idle time between iteration transmissions in seconds. Zero by default.transmit_ports (
list[int] |None) – List of transmit port indices considered for delay calibration. IfNone, all available transmit ports are used.receive_ports (
list[int] |None) – List of receive port indices considered for delay calibration. IfNone, all available receive ports are used.
- Return type:
Returns: An initialized delay calibration instance.
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type:
- class NoDelayCalibration(device=None, transmit_ports=None, receive_ports=None)[source]¶
Bases:
DelayCalibrationBaseNo delay calibration.
Args:
- device:
The physical device to which this calibration belongs. If provided, the device will be configured to use this calibration.
- transmit_ports:
List of transmit port indices considered for this calibration. If
None, all available transmit ports are assumed.- receive_ports:
List of receive port indices considered for this calibration. If
None, all available receive ports are assumed.
- classmethod Deserialize(process)[source]¶
Deserialize an object’s state.
Objects cannot be deserialized directly, instead a
Factorymust be instructed to carry out the deserialization process.- Parameters:
process (
DeserializationProcess) – The current stage of the deserialization process. This object is generated by theFactoryand provides an interface to deserialization methods supporting multiple backends.- Return type:
- Returns:
The deserialized object.
- correct_receive_delay(signal)[source]¶
Apply the delay calibration to a received signal.
Returns: The corrected signal.
- serialize(process)[source]¶
Serialize this object’s state.
Objects cannot be serialized directly, instead a
Factorymust be instructed to carry out the serialization process.- Parameters:
process (
SerializationProcess) – The current stage of the serialization process. This object is generated by theFactoryand provides an interface to serialization methods supporting multiple backends.- Return type: